Pytorch分布式训练
Pytorch分布式训练
本文主要介绍DistributedDataParallel以及DataParallel并行的区别和DDP的原理、方法。
单机多卡并行
常用切分方案有:数据并行、模型并行、通道并行(数据+模型并行)
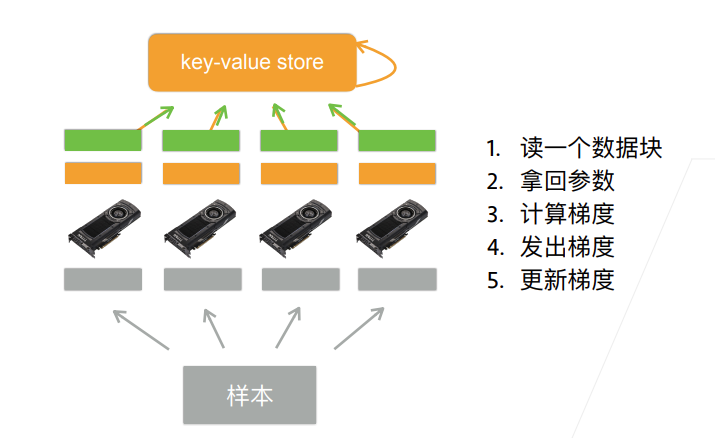
数据并行:将batch分成n块,每个GPU拿到完整参数计算一块数据的梯度,该方法通常性能更好
模型并行:将模型分成n块,每个GPU拿到一块模型计算其前向和方向结果,该方法通常适用于单GPU放不下大模型的情况,这就会导致整个计算过程是串行的,加大了性能优化难度
DDP 与 DP 的区别
DDP与DP的区别
DDP在DataLoader部分需要使用Sampler,保证不同GPU卡处理独立的子集.
DDP在模型部分使用DistributedDataParallel.
DP不能做BN同步,DDP可以
DP存在负载不均衡的问题(主卡的显存占用大于其他卡,甚至远大于。有时主卡爆了而其他卡的显存还没到一半),而DDP没有
因为DP并不是完全的并行计算,只是数据在多张卡上并行计算,模型的保存和Loss的计算都是集中在几张卡中的一张上面,这也导致了多卡显存占用会不一致。
DDP的速度要比DP更快
DP 的通信成本随着 GPU 数量线性增长,而 DDP 支持 Ring AllReduce,其通信成本是恒定的,与 GPU 数量无关。
DDP 多卡训练的原理
将模型在各个GPU上复制一份;
将总的batch数据等分到不同的GPU上进行计算(shuffle顺序打乱的)。每个进程都从磁盘加载其自己的数据
在模型训练时,损失函数的前向传播和计算在每个 GPU 上独立执行。因此,不需要收集网络输出。在反向传播期间,各个进程通过一种叫Ring-Reduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的平均梯度;然后用这个值在所有GPU上执行梯度下降
从而每个 GPU 在反向传播结束时最终得到平均梯度的相同副本。
各个进程用平均后的梯度更新自己的参数,因为各个进程的初始参数、更新梯度是一致的,所以更新后的参数也是完全相同的。
这里的汇总还是由rank=0的卡汇总平均,然后再广播到其他卡。至于为什么不只用其他卡和主卡通信而是其他卡之间也要通信,是因为用的是ring-reduce, 组成一个环形来作信息传递,在多卡的情形下更高效
DDP利用All-Reduce,来进行不同进程上的梯度的平均操作(Ring-Reduce是All-Reduce的一个实现版本)
不同卡之间只有梯度在通信。
在Pytorch中使用DDP
DDP的官方最佳实践是,每个进程对应一张卡
举个例子:我有两台机子,每台8张显卡,那就是2x8=16个进程,并行数是16。
但是,我们也是可以给每个进程分配多张卡的。总的来说,分为以下三种情况:
- 每个进程一张卡。这是DDP的最佳使用方法。
- 每个进程多张卡,复制模式。一个模型复制在不同卡上面,每个进程都实质等同于DP模式。这样做是能跑得通的,但是,速度不如上一种方法,一般不采用。
- 每个进程多张卡,并行模式。一个模型的不同部分分布在不同的卡上面。例如,网络的前半部分在0号卡上,后半部分在1号卡上。这种场景,一般是因为我们的模型非常大,大到一张卡都塞不下batch size = 1的一个模型。