Diffusion演化进程
Diffusion演化进程
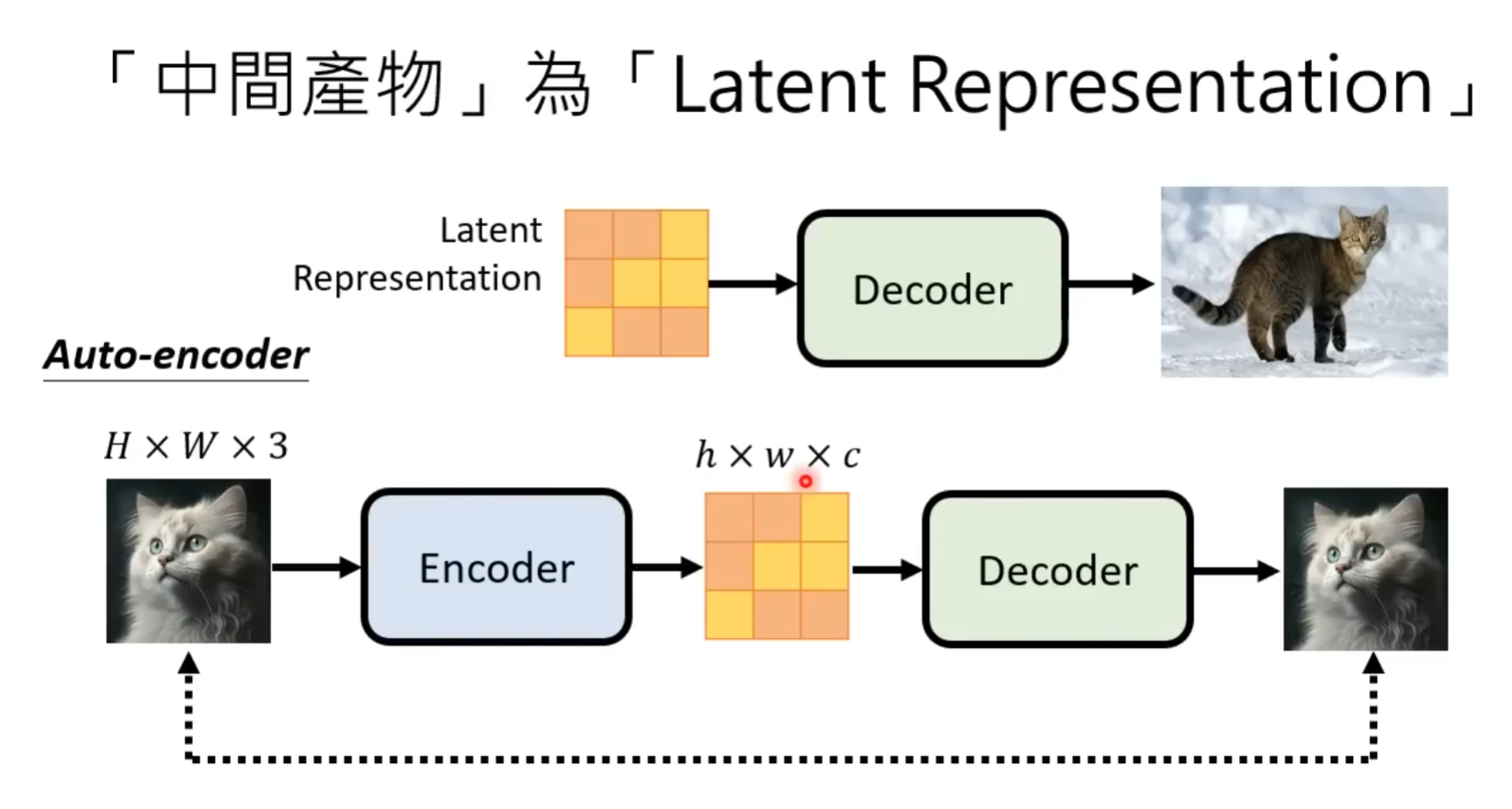
Auto-Encoding Variational Bayes(VAE) [ ICLR 2014 ]
x 分布:真实的图片分布,无法估计
z 分布:
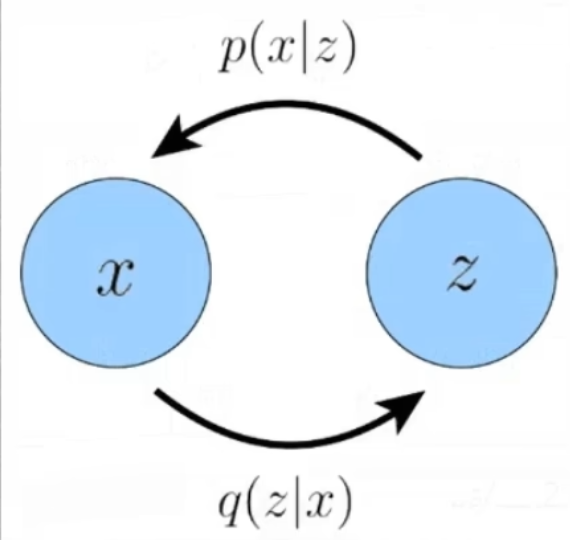
:Encoder 将图片分布映射到高斯分布
:Decoder 将高斯分布映射到真实图片分布
目标是最大化ELBO:
其中:
- 重构项(reconstruction term):衡量解码器重建输入的能力,也就是说解码器能否把压缩后的隐变量重新还原出原始输入;
- 先验匹配项(prior matching term):通过 KL 散度约束隐变量分布接近先验分布,表示将图片映射到的分布约束成一个高斯分布让潜变量的分布更“规整”。

VAE的概念是将图片输入到一个 Encoder 里面使其映射到 Latent Space 再通过 Decoder 尽可能还原成原来的图片
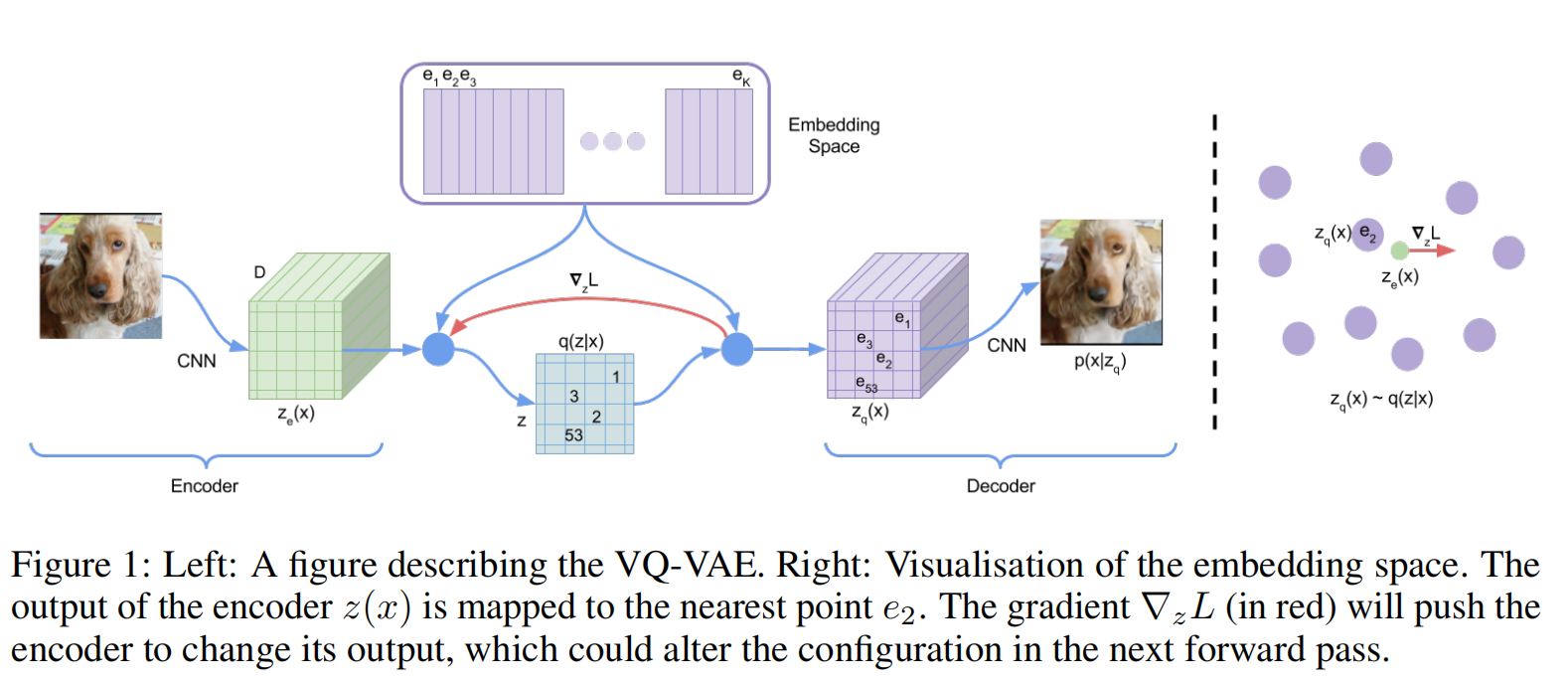
Neural Discrete Representation Learning(VQ-VAE) [ NeurIPS2017 ]
对于图片来说,可能并不需要一个完整的高斯分布来表征整个的图片数据分布,由此VAE -> VQ ( Vecotr Quantization 向量离散化 )-VAE:将VAE中整个高斯分布空间离散化成若干个空间的点(下图中的Embeding Space)
目标函数:
其中:
- :表示重构项,衡量解码器在给定量化后的隐变量 时,能否准确重建输入
- :只用于更新codebook的 ,不反向传播到编码器,目的是让 靠近编码器输出
- :只更新编码器,约束编码器的输出不要频繁跳变,使其贴近量化后的
训练过程:
- encoder、decoder与VAE类似
- codebook:通过最小化 以及 的 -NORM
生成过程:VQ-VAE训练PixelCNN(自回归模型)作为Prior用来拟合 ,通过 就能自回归采样得到 ,自回归的过程类似于gpt生成文本的过程,也就是已知 前面的一部分特征 ,,预测并采样下一个特征 。Prior模型生成的 输入到decoder后便可生成图片
Generating Diverse High-Fidelity Images with VQ-VAE-2 [ NeurIPS 2019 ]
在VQ-VAE上加了多尺度的codebook,通过两层级联的方式让生成的图片分辨率更高
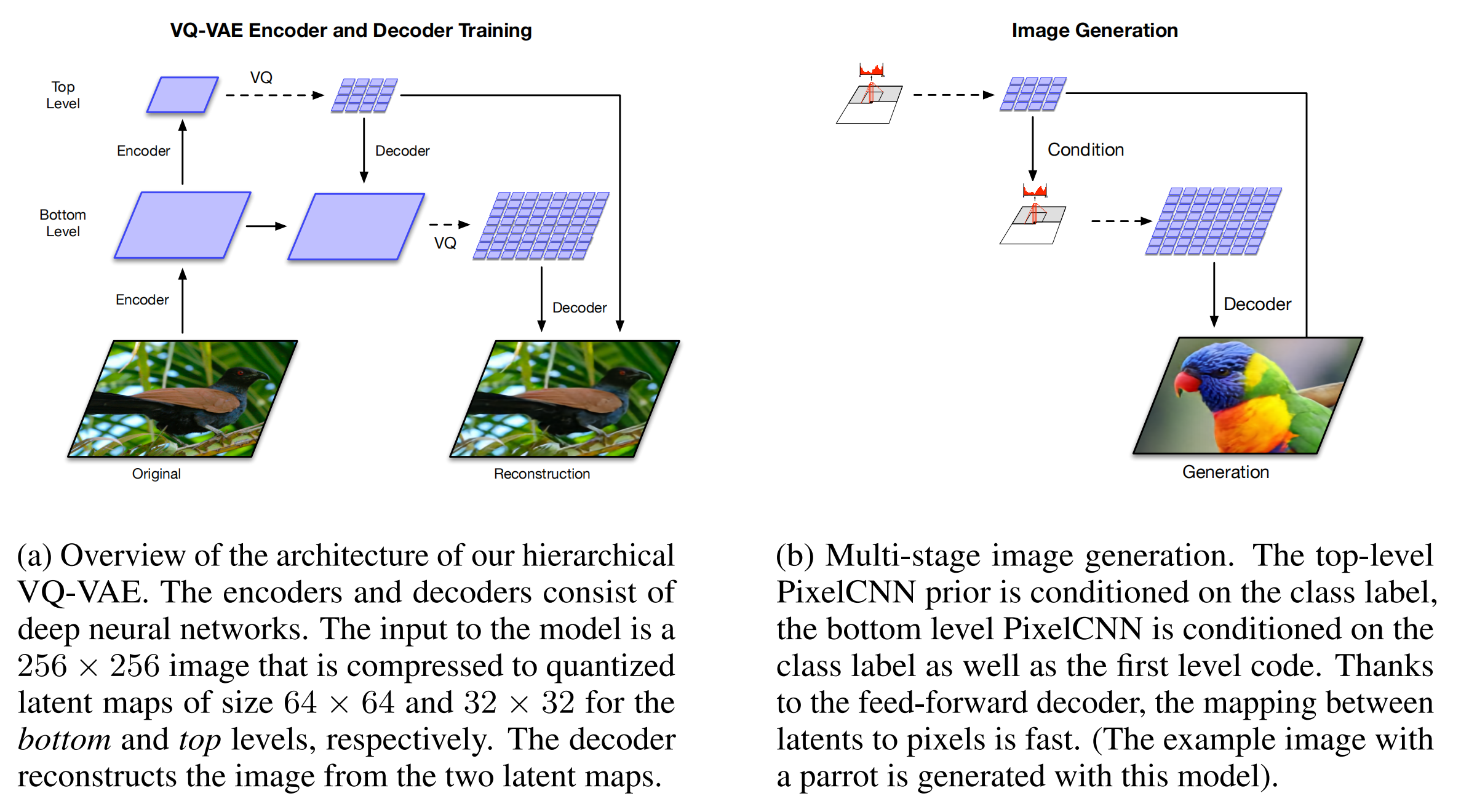
首先在top-level上自回归生成初始特征(不具备实际意义,人眼看上去并不是一张图片)作为bottom-level的condition。因此在生成图片的时候不仅考虑到之前的 ,还有top-level生成的的特征图
Zero-Shot Text-to-Image Generation (DALL-E) [ 2021 ]
DALL-E沿用了VQ-VAE两阶段模型训练的范式:
- stage1:训练Encoder、Decoder,得到图像的codebook(size:512 -> 8192)
- stage2:训练Prior(PixelCNN -> 12B基于transformer的自回归模型(GPT))
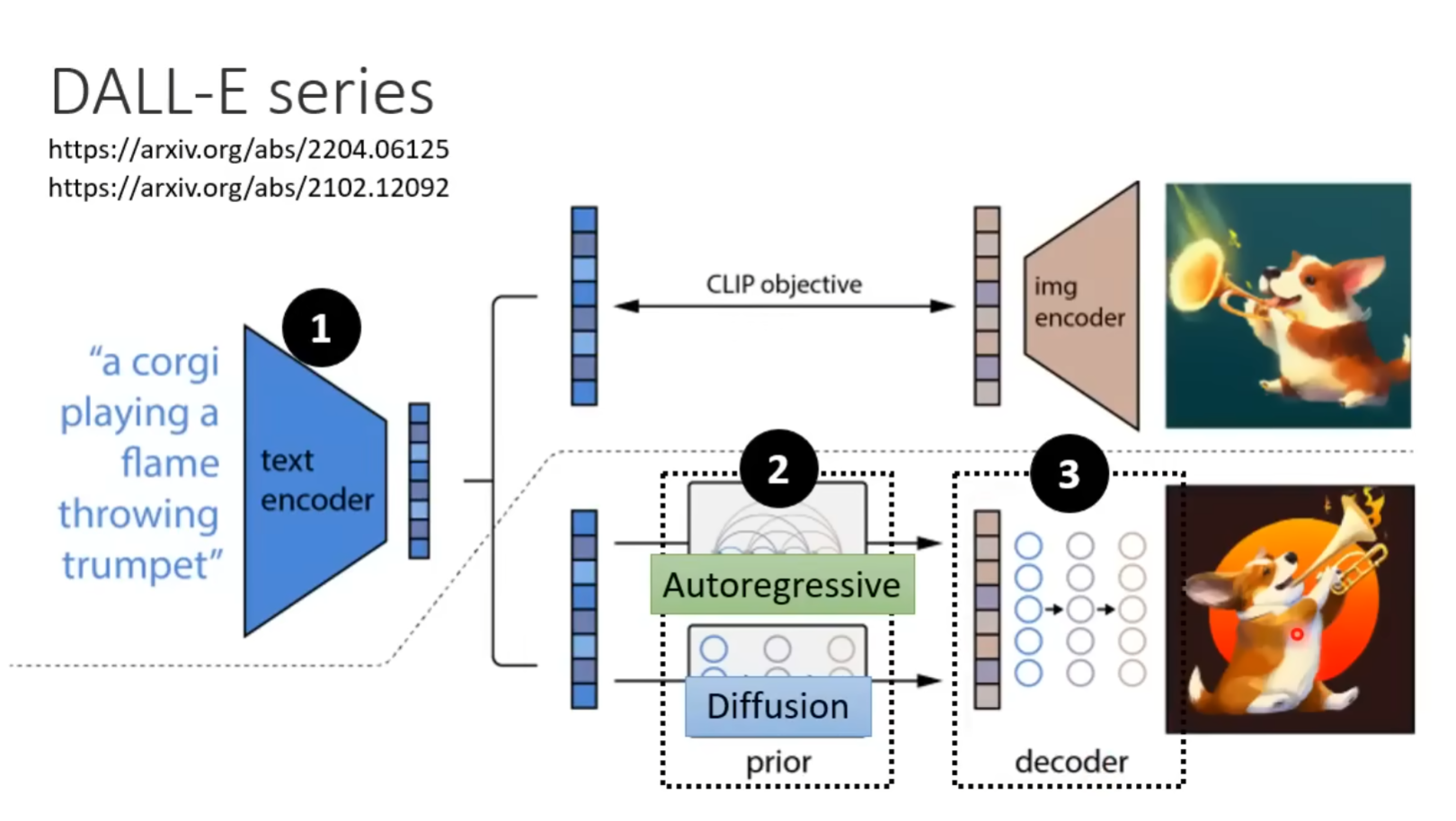
Prior改进:图像单模态 -> 文本图像多模态
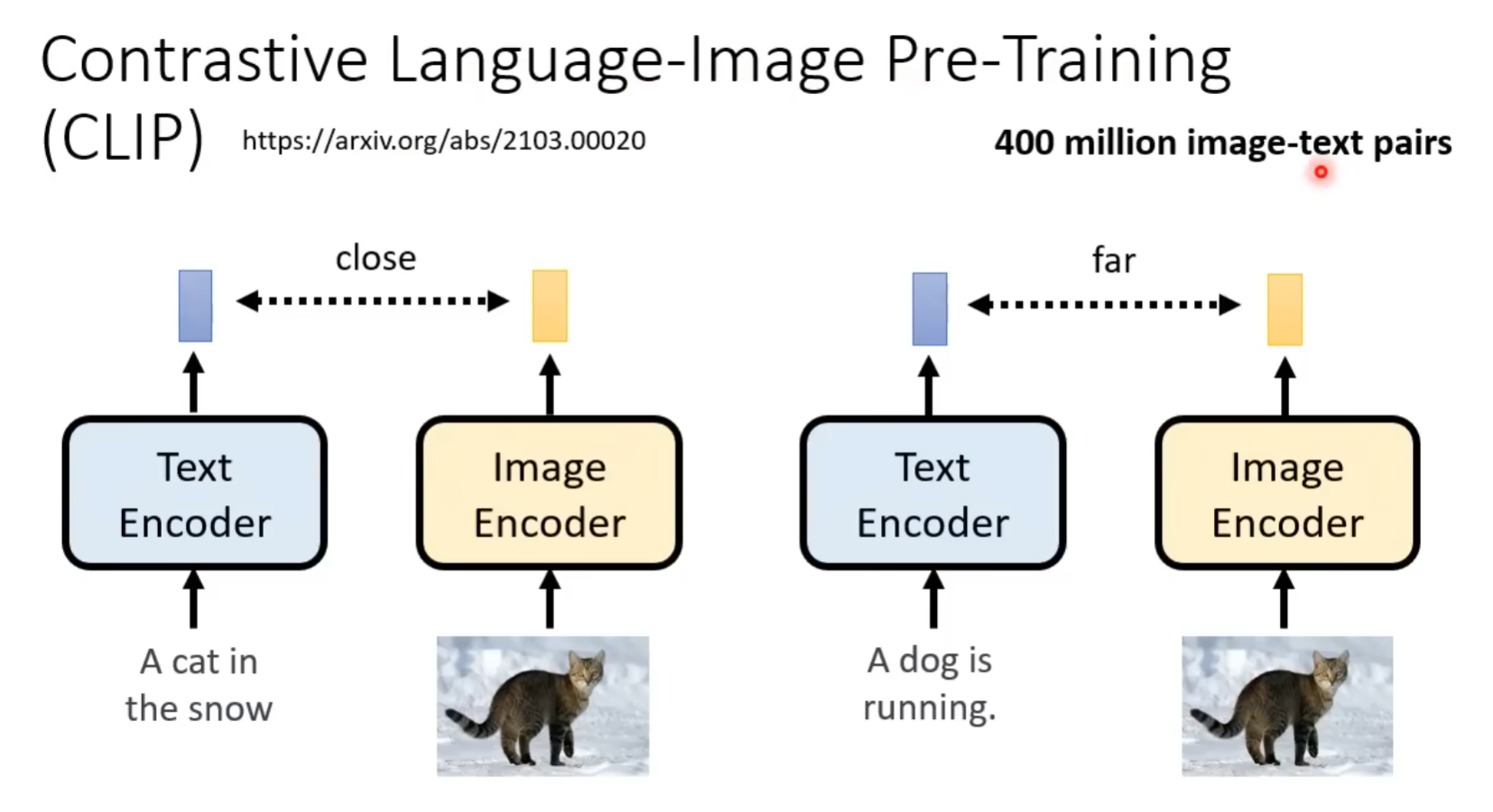
Reranking:同一个text生成多张图片,根据CLIP-score筛选得到好的生成结果
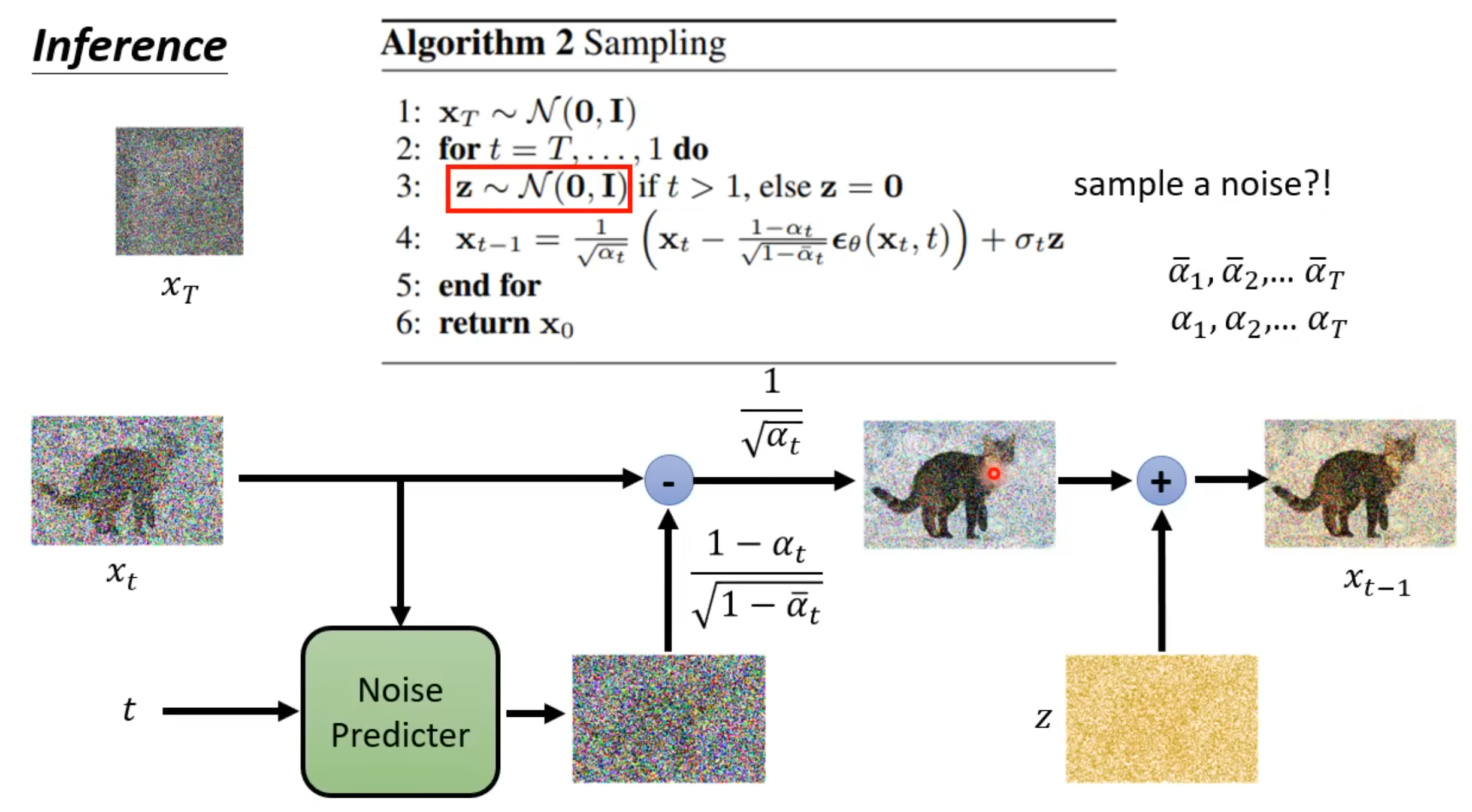
Denoising Diffusion Probabilistic Models (DDPM/Diffusion) [ NIPS 2020 ]
本节搬运于台大李宏毅教授的Diffusion model原理解析,diffusion公式推到可以参照Understanding Diffusion Models: A Unified Perspective
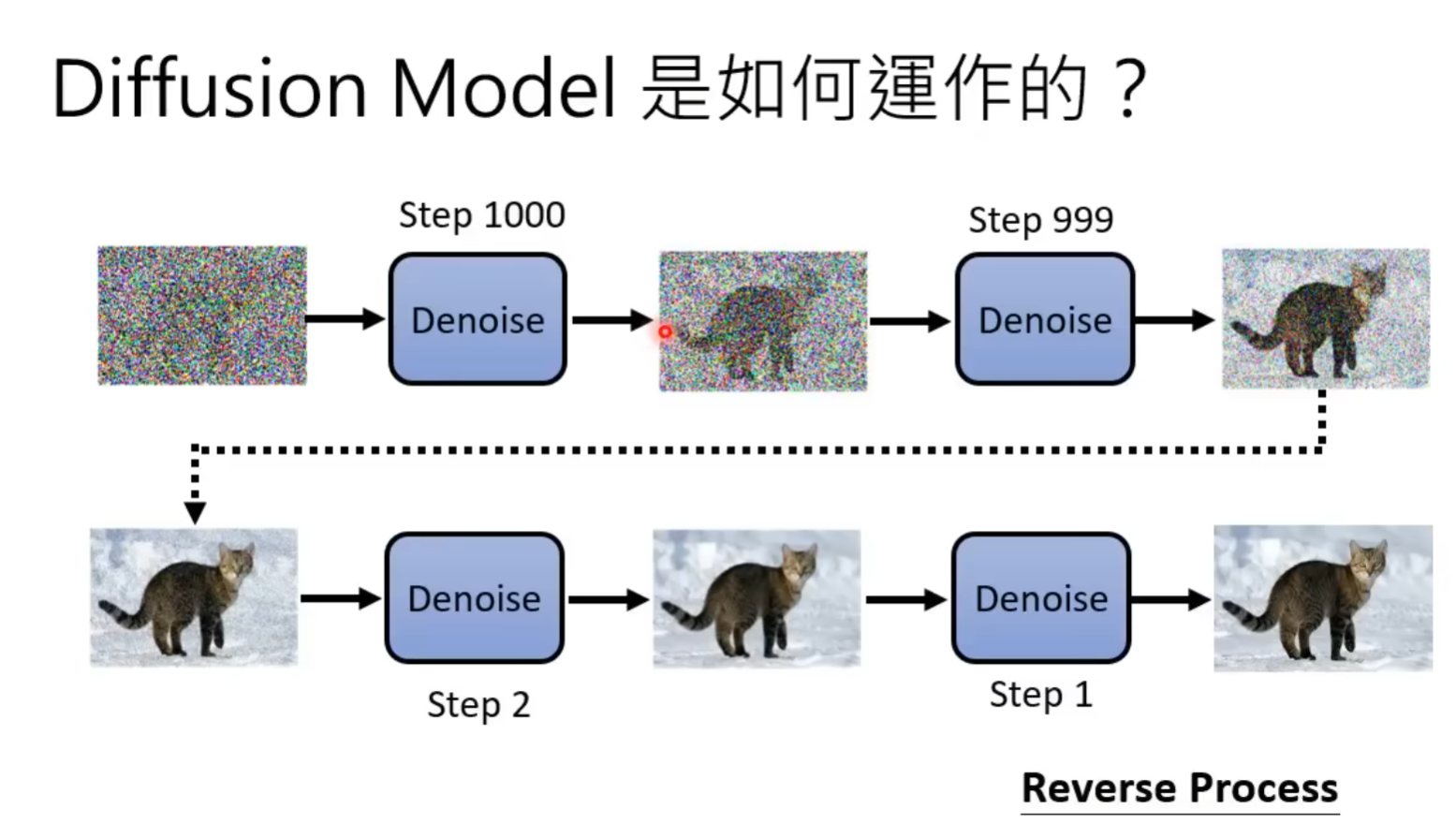
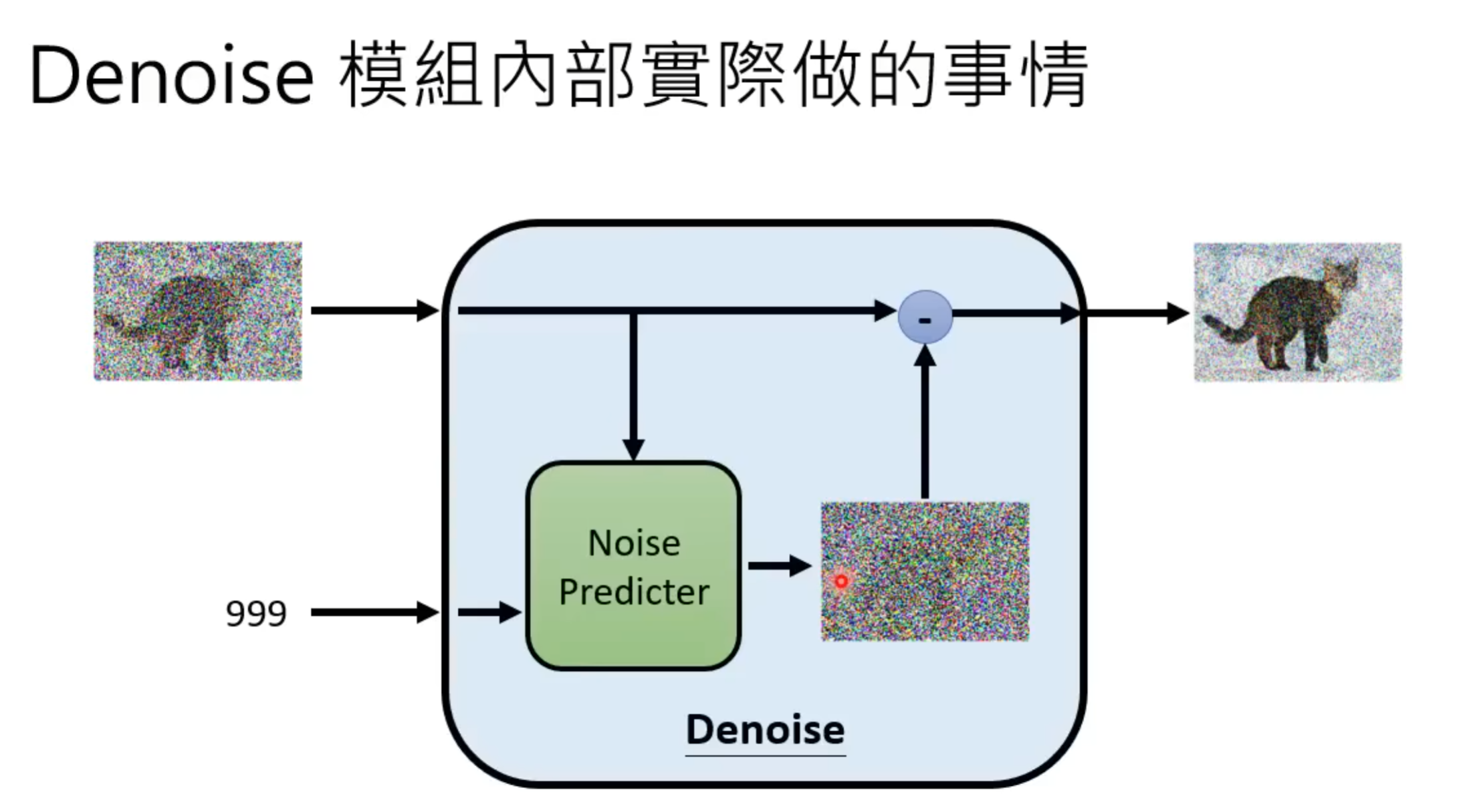
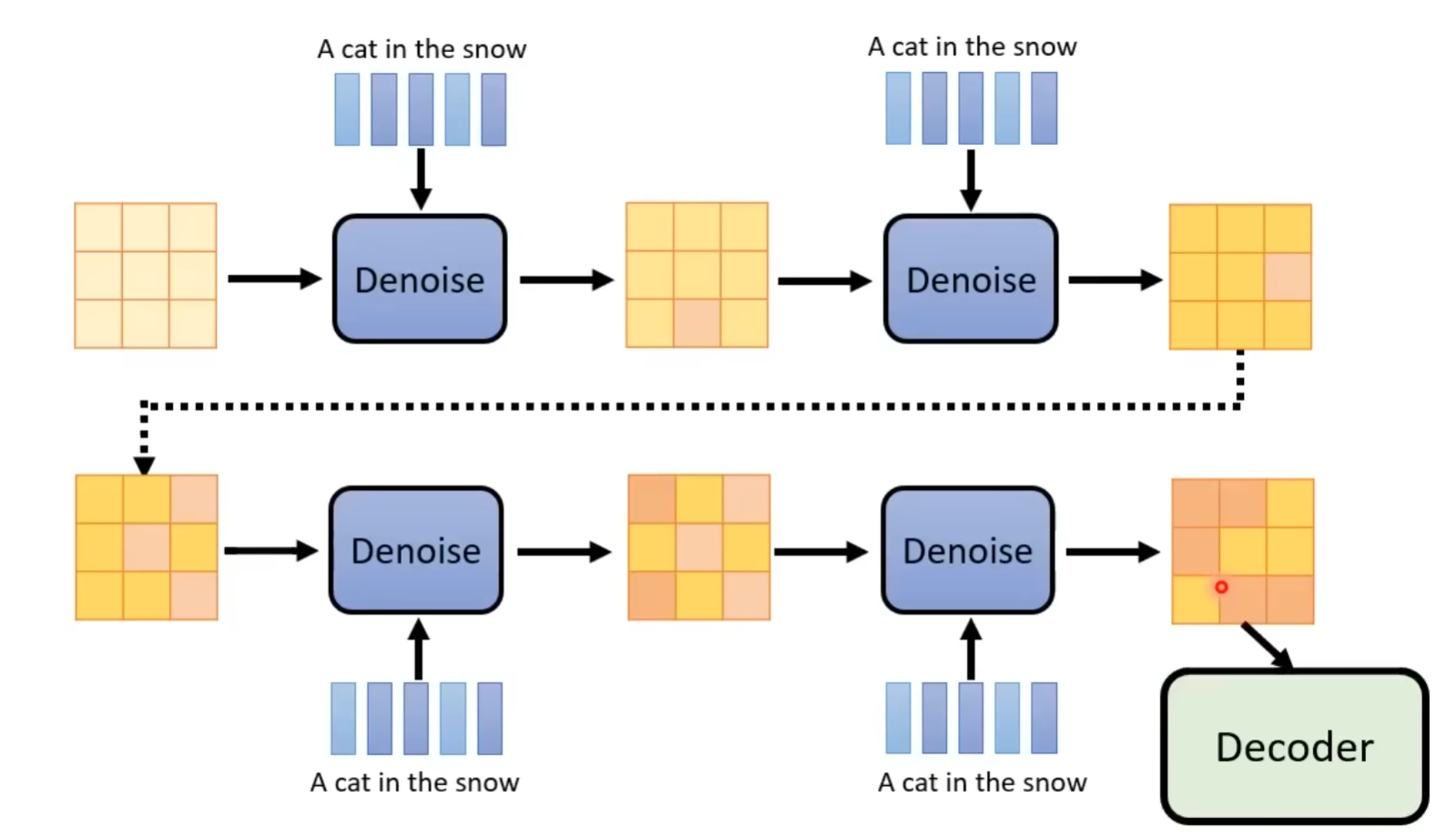
模型内部中不用End2End直接产生去噪后的图片而是用Noise Predicter预测噪声后去噪是因为直接产生图片的难度可能太大,而通过预测噪声再去噪的间接方式能让整个pipeline更加平滑
图文匹配数据集对来源于laion数据集。
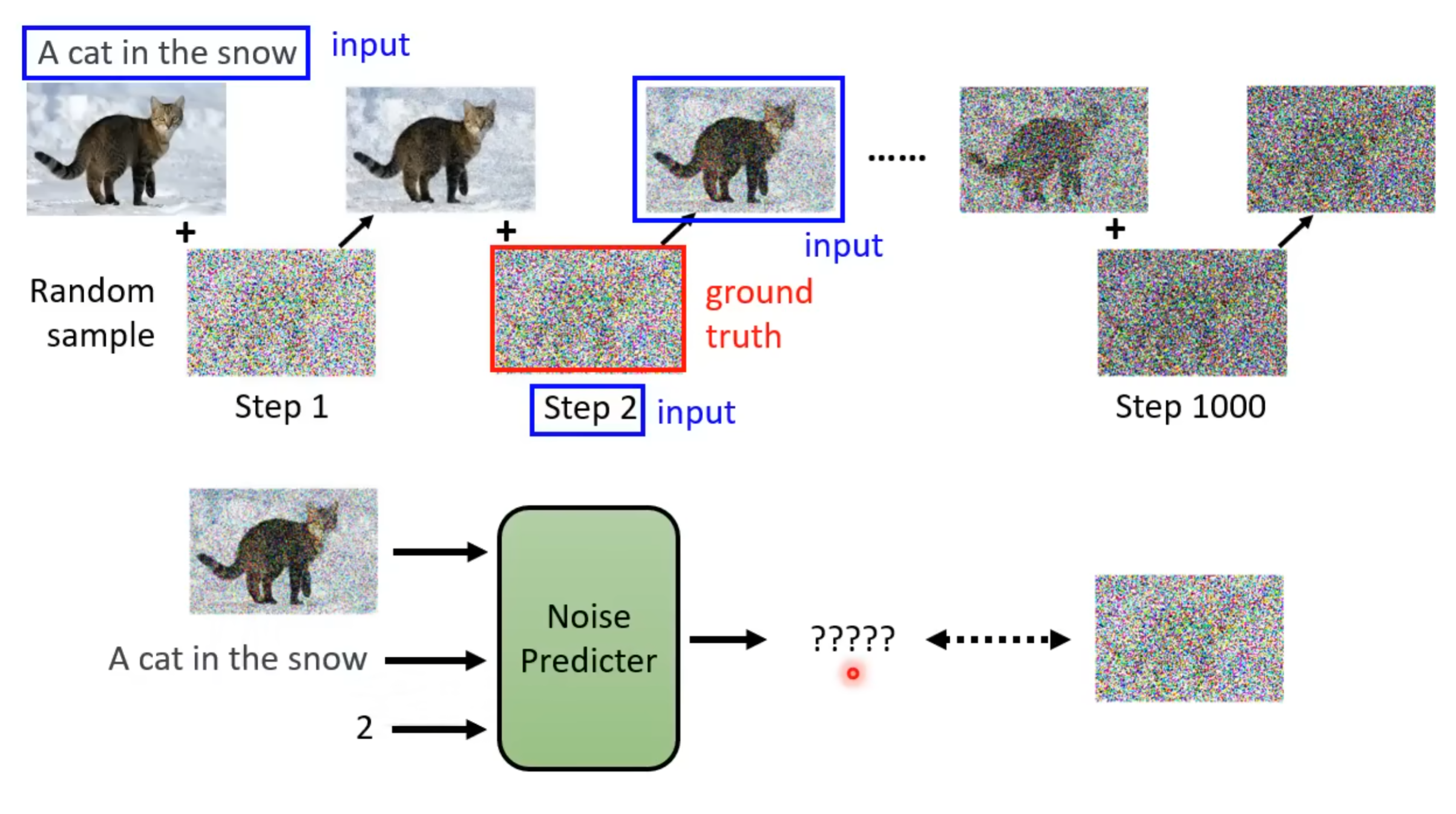
最终Noise Predicter的输入为:
- 当前的噪声图片
- 原始图像对应的caption
- step number:当前是第几次加噪
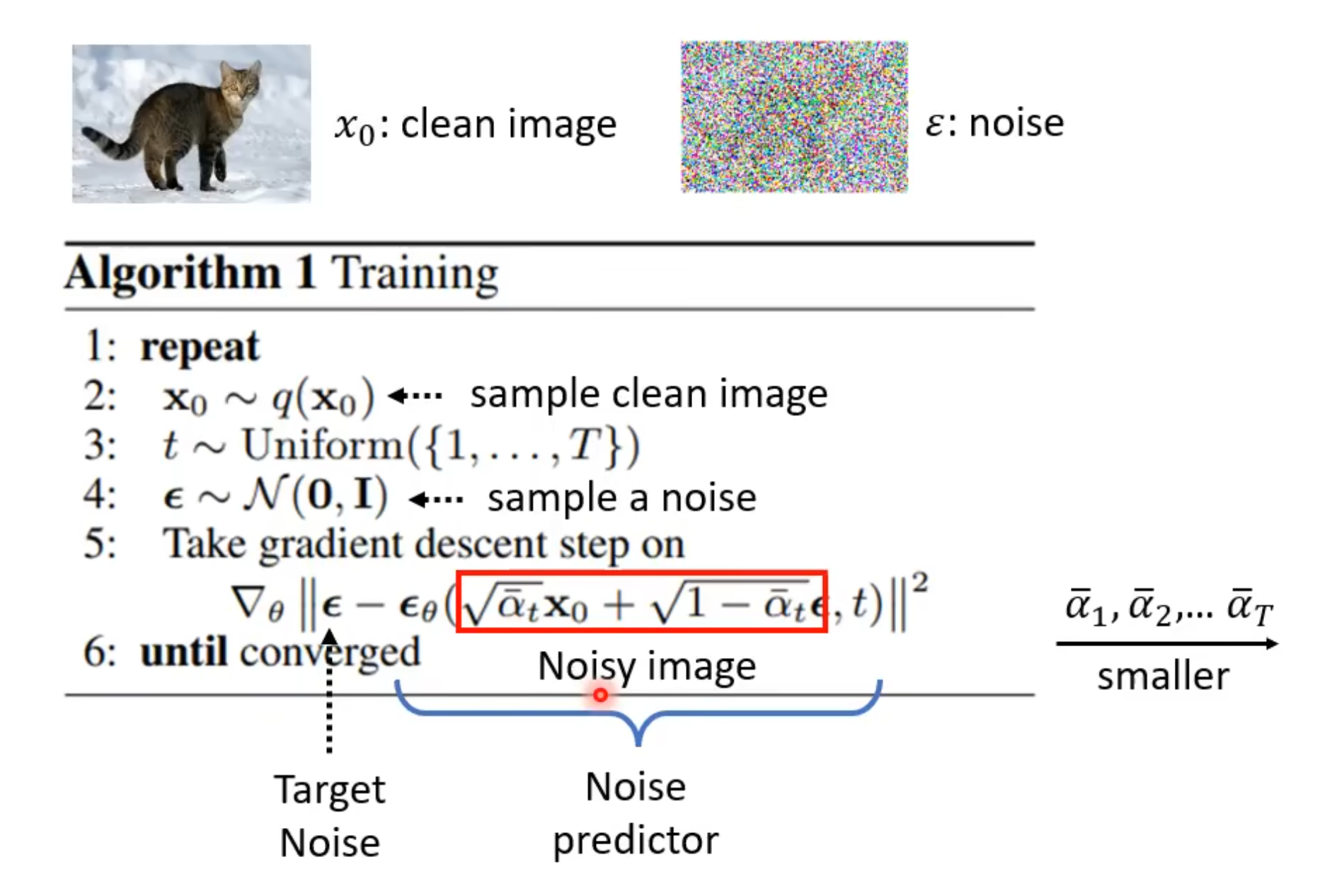
Ground Truth为本次添加的噪声
T越大加上的噪声越多
High-Resolution Image Synthesis with Latent Diffusion Models (Stable Diffusion) [ CVPR Oral 2022 ]
本节搬运于台大李宏毅教授的Diffusion model原理解析
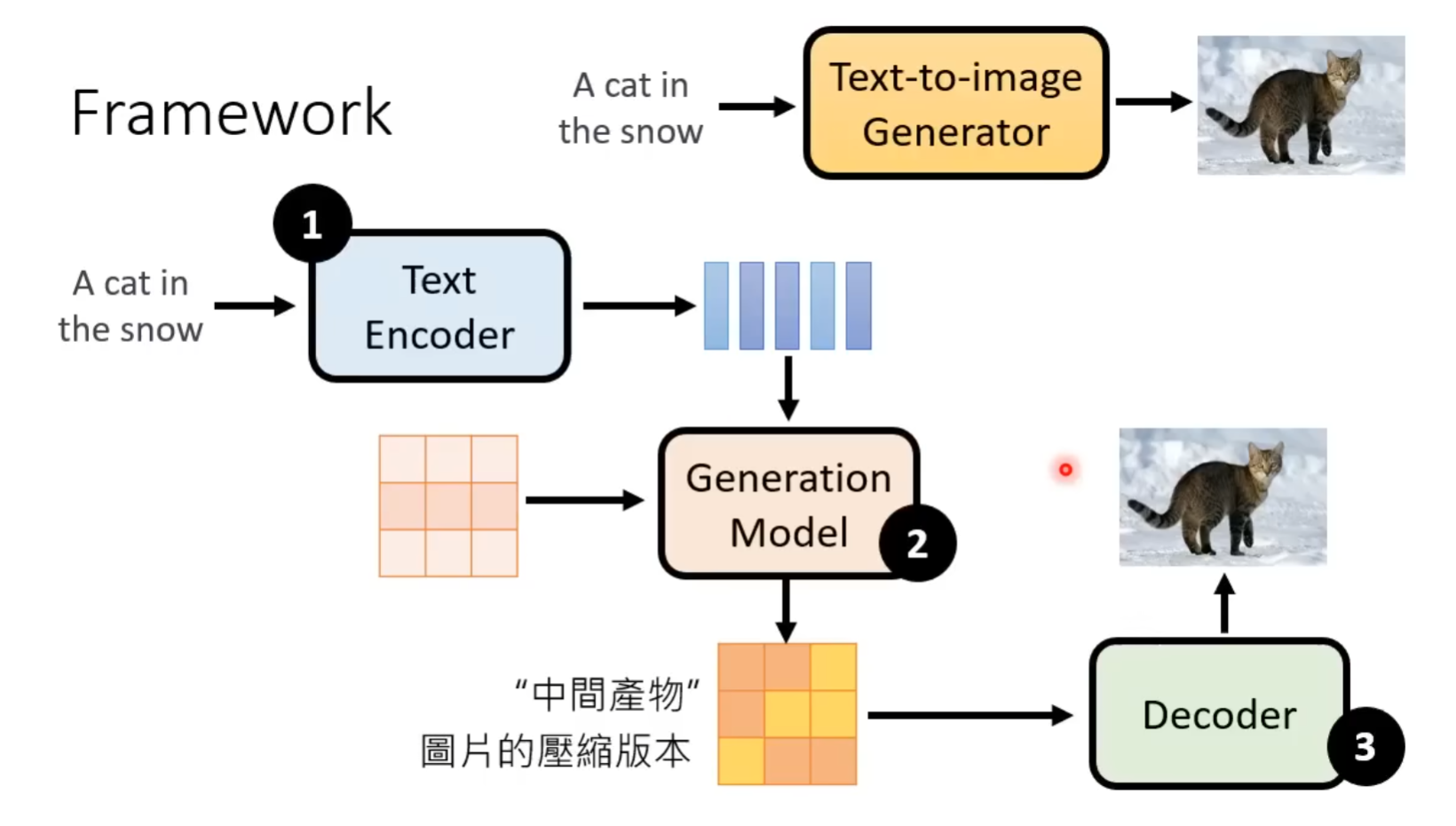
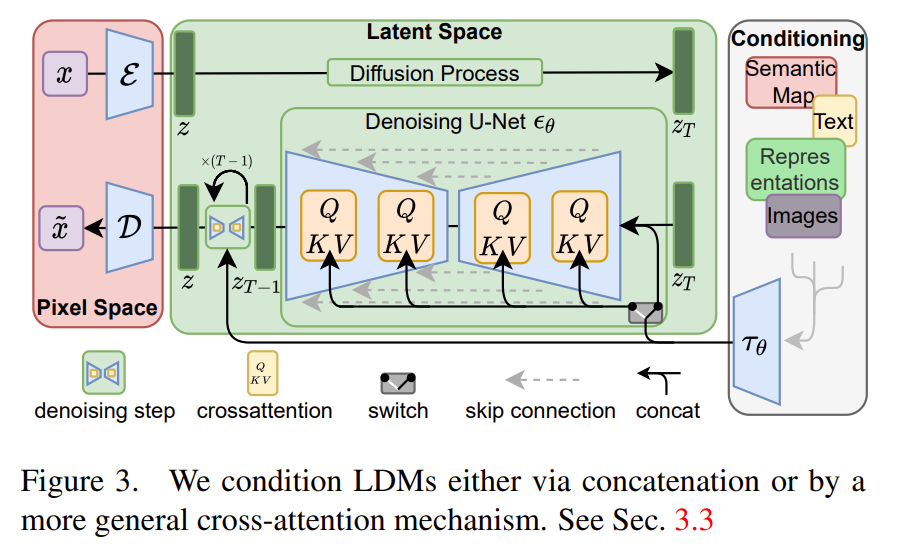
其中三个模块是分开训练
Decoder训练

Generation model训练

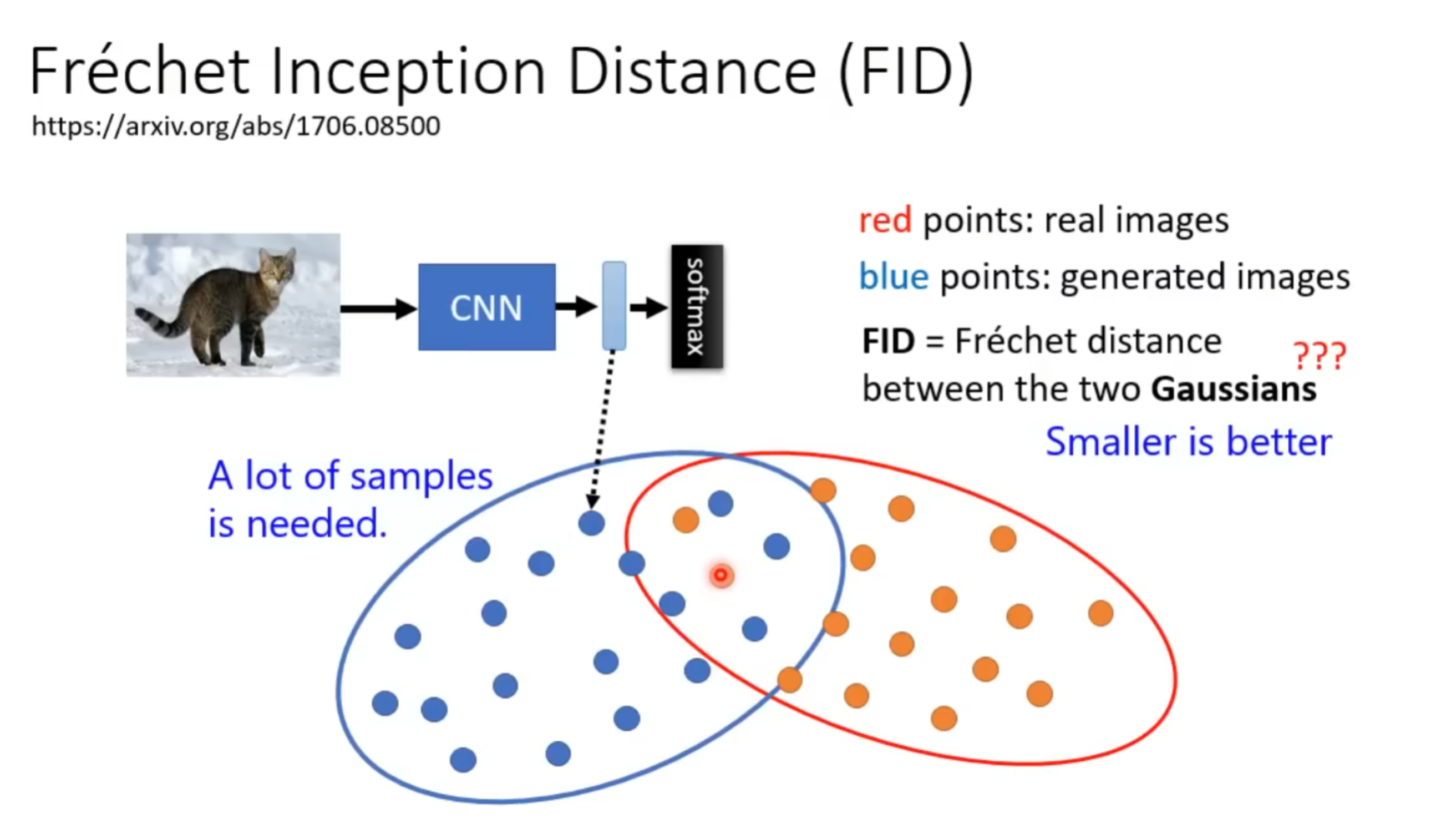
评价指标:
Scalable Diffusion Models with Transformers (DiT) [ ICCV Oral 2023 ]
代码仓库: https://github.com/facebookresearch/DiT
MOTIVATION: 本文验证了卷积U-Net并非是影响扩散模型性能的关键因素,并探索了Transformer作为扩散骨干网络的可行性
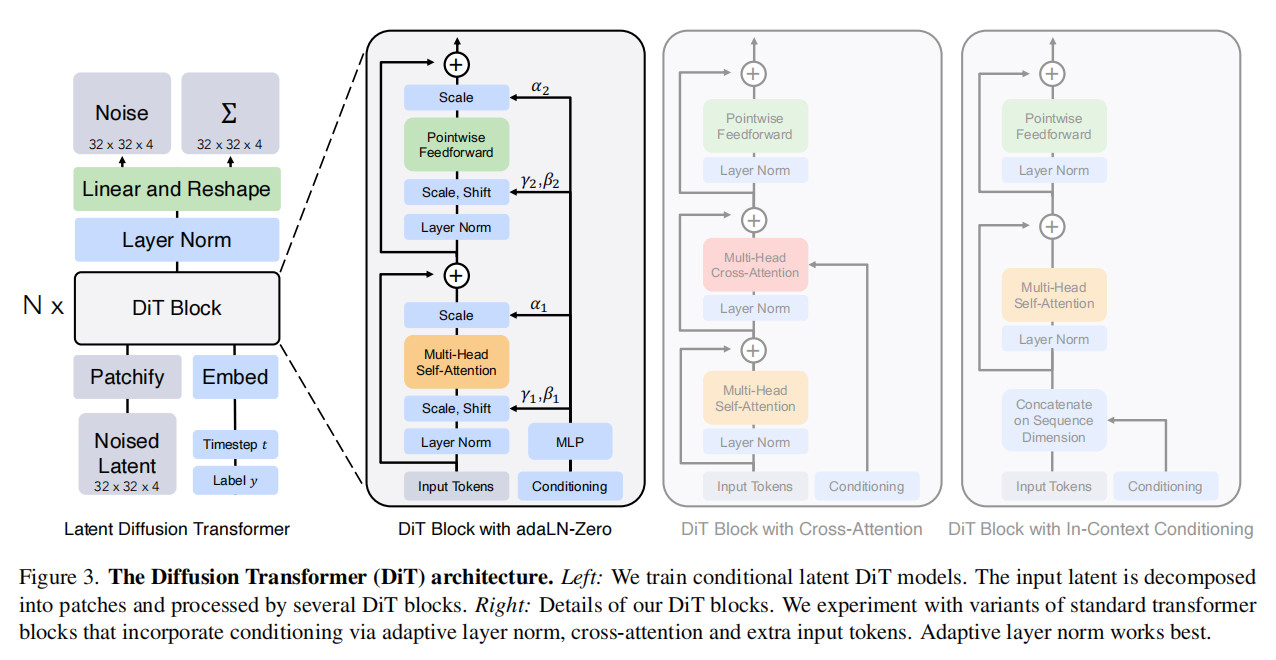
Patchify: DiT 的输入为空间表征 𝑧(对 256 × 256 × 3 的图像,𝑧的形状为32×32×4)。“patchify”将空间输入切分并线性嵌入为长度为 𝑇 的 token 序列。
DiT block:
上下文内条件(In-context conditioning): 将𝑡 与 𝑐 的向量嵌入作为两个额外 token 直接拼接到输入序列中,与图像 token 一视同仁处理。这有点类似于 ViT 的 cls token,可直接使用标准 ViT block 而无需修改;在最后一个 block 后再移除条件 token。该设计将条件当成“序列里的特殊词”,靠自注意力与图像 token 交互来传递条件影响。因此几乎不引入额外 Gflops。
交叉注意力 block(Cross-attention block): 将 𝑡 与 𝑐 的嵌入拼接为长度为2的独立序列,与图像 token 序列分开;在 self-attention 后新增一层 multi-head cross-attention(类似 Transformer 的原始设计,图像 token 作为 query,条件 token 作为 key/value,让图像特征显式“读取”条件信息)。交叉注意力会带来最多的 Gflops,约增加 15% 的开销。
自适应层归一化(Adaptive layer norm, adaLN): 不再把条件当 token,也不加 cross-attention,而是把标准 LayerNorm 换成 adaLN。由 (𝑡,𝑐)的嵌入向量(通常是相加后)通过一个小网络回归出该层的缩放 𝛾 与平移 𝛽 ;由 𝛾 与 𝛽 去调制 LayerNorm 的输出(相当于对所有 token 做同一种条件化的仿射变换)。也就是说这里的条件不是“参与注意力”,而是“调节每层的归一化”(类似很多扩散 U-Net / 条件 GAN 的条件注入习惯),但是这样的设计会让条件作用方式过于全局一致
adaLN-Zero block: 在 adaLN 的基础上再回归一组逐维门控/缩放参数 𝛼并把它用在残差分支上;同时将产生 𝛼 的 MLP 零初始化,使得训练开始时 𝛼≈0,从而 每个 block 初始近似恒等映射。该设计进一步解决“训练初期 Transformer 堆叠很深时,如何更稳定、更容易优化”。它让网络从“基本不改动输入”的安全状态开始学,逐步打开残差分支。
本文将上述四类 block 纳入 DiT 设计空间。并且实验结论表明:
Gflops 是决定生成质量(FID)提升的主导变量: 实验显示,无论通过增大模型规模(更深/更宽)还是通过减小 patch size 增加 token 数,只要带来更高的 Gflops,FID 就会在训练过程中持续改善;并且在 Gflops 接近时,不同配置往往得到相近 FID,体现出强相关性
在“怎么把条件喂给模型”上,adaLN-Zero 是关键设计点: 四种 block 对比中,adaLN-Zero在计算效率最高的同时取得最低 FID,并显著优于普通 adaLN(说明“恒等初始化/零初始化残差”对训练与效果很关键);后续所有实验都固定采用该设计。
采样步数更多”无法替代“模型更强: 即便给小模型增加采样步数、投入更多采样阶段计算量,整体仍难以追上大模型;结论是训练得到的高 Gflops 模型能力不可由采样阶段加计算完全弥补。
DyDiT_Dynamic Diffusion Transformer (DyDiT) [ ICLR 2025 ]
代码仓库: https://github.com/NUS-HPC-AI-Lab/Dynamic-Diffusion-Transformer
MOTIVATION: 本文聚焦于 DiT 生成过程中的两类结构性冗余:
- 不同扩散时间步的噪声预测难度并不一致,但 DiT 却在所有时间步使用同一套计算规模;
- 同一时间步内不同空间 patch 的预测难度也不均衡,却被统一“等算力”处理。
基于此,本文要解决的问题可概括为:在不显著牺牲生成质量的前提下,让 DiT 的计算资源随时间步与空间区域的真实难度自适应分配。
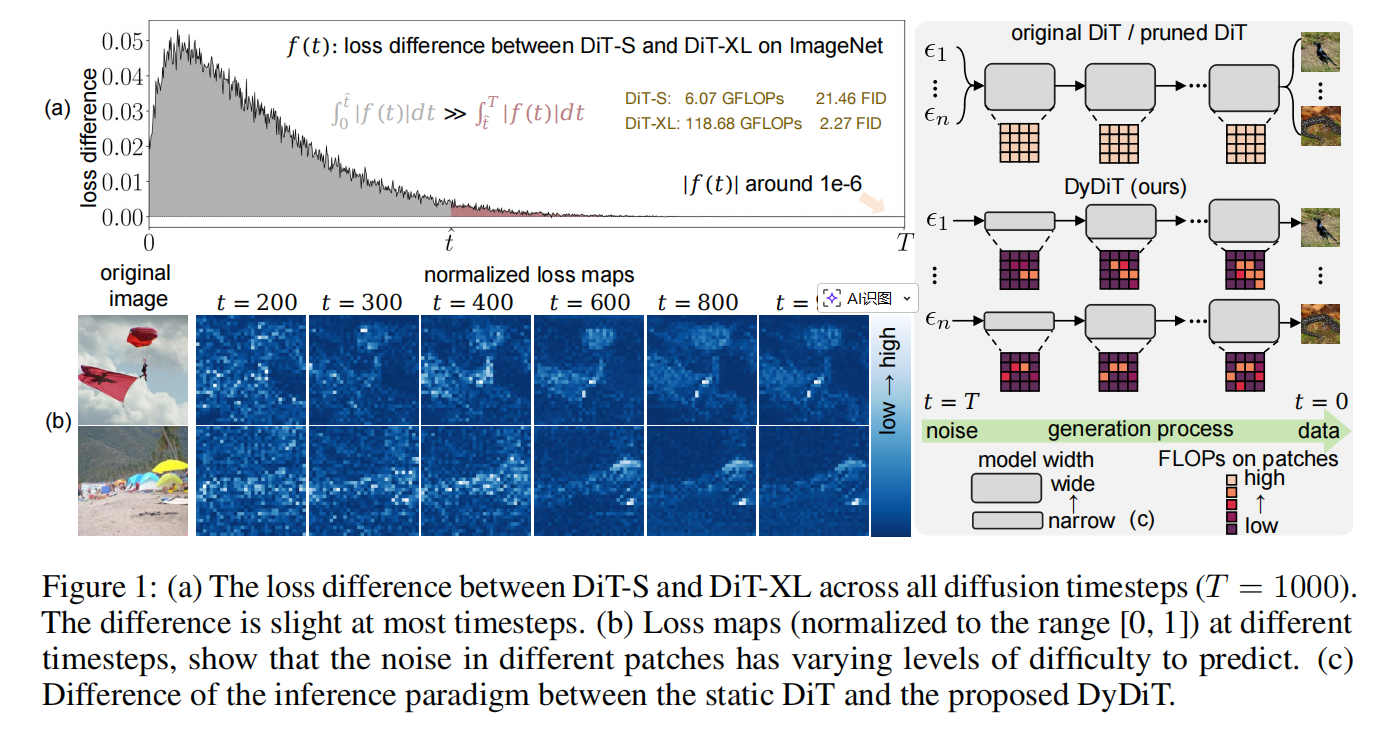
图1(a)表示在更后期的时间步,预测任务会逐渐变得更容易,即便更小的模型也能有效处理。然而,DiT 在所有时间步都使用相同架构,导致在任务复杂度较低的时间步产生过高的计算成本。
图1(b)表示噪声预测的难度会随空间区域而变化。因此,对所有 patch 进行一致的计算处理会引入冗余,并很可能不是最优策略。
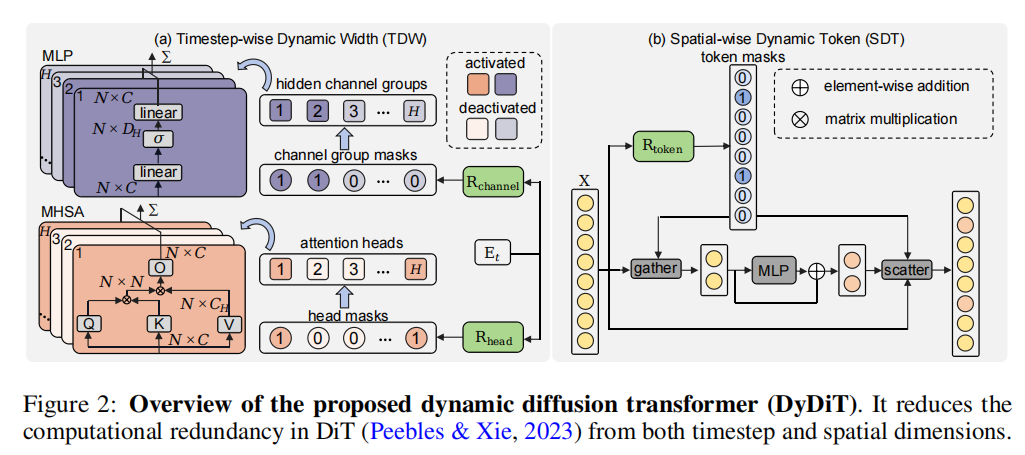
按时间步动态宽度(Timestep-wise Dynamic Width, TDW): 作者在每个 Transformer block 里加了两个很轻量的“开关控制器”(router),它们只看当前时间步的嵌入向量 ,就能给出一组介于 0 到 1 的分数,分别表示每个注意力头、每个 MLP 通道组在这个时间步“需要被用到”的概率。然后用一个简单阈值(例如 0.5)把这些分数二值化(为 1 的头/通道组就参与计算,为 0 的就直接跳过)。这样一来,在更容易的时间步,模型会自动激活更少的注意力头和通道组;在更难的时间步,激活更多,从而实现“随时间步变化的宽度”。更关键的是,这种开关只依赖时间步而不依赖具体样本,因此训练完成后可以把每个时间步到底开哪些头、哪些通道组提前离线算好并固定下来。部署时,相当于每个时间步用一套预先确定的子网络做推理,避免了传统动态网络那种“每个样本结构都不一样”导致的 batch 难加速问题,因此更容易获得真实的硬件加速收益。
按空间动态 Token(Spatial-wise Dynamic Token, SDT): SDT 解决的是“同一时间步里,不同图像区域的计算也不该一刀切”的问题:主体区域往往更难、背景区域往往更容易,如果对每个 patch 都做同等强度的计算,就会把大量算力浪费在本来就简单的背景上。为此,作者在每一层的 MLP 之前加了一个 token 路由器,它直接看这一层的 token 特征 𝑋,为每个 token 预测一个“是否需要进入 MLP 进一步处理”的概率,再用阈值得到 0/1 决策:为 1 的 token 才送进 MLP,为 0 的 token 直接绕过 MLP(相当于不对它做这部分昂贵计算)。推理时为了真正省算力,不是把不用的 token 也丢进 MLP 再乘 0,而是先把需要计算的 token “挑出来”(gather)组成更小的集合送入 MLP,算完后再把结果“放回原位”(scatter)。作者强调 SDT 只作用在 MLP,而不去跳过注意力层:因为注意力层负责 token 之间的信息交互,跳过它更容易伤害生成质量;并且注意力层若 token 数在 batch 内变化,会让张量形状不一致,反而影响吞吐。由于 MLP 本身不需要 token 之间交互,gather/scatter 的开销又很小,所以 SDT 可以在不明显破坏 batch 推理效率的前提下,减少大量“空间上不必要”的计算。
微调稳定化(Fine-tuning stabilization):
实践中,作者发现直接用 𝐿 微调 DyDiT 可能偶尔不稳定。为此采用两项稳定化策略:
Warm-up 阶段:先保持一个完整的 DiT 模型在相同扩散目标下监督训练,在总损失 𝐿 外额外加入 ,完成 warm-up 后移除该项,再仅用 𝐿 继续训练。
保证最关键组件始终激活:在微调前,根据幅值准则对 MHSA 的注意力头与 MLP 的隐藏通道进行重要性排序;在 TDW 中始终选择最重要的那个头与通道组,确保在所有时间步、每个 MHSA/MLP 中至少有 1 个头与 1 个通道组被激活,从而缓解不稳定。